Microb Technology/2009/Mechanics/bloc moteur
De Wikidroids
Bloc moteur
Voici un petit descriptif de la fabrication de nos blocs moteurs.
A savoir avant toute chose:
Il faut impérativement que les axes des deux roues soient le plus coaxials possible. En effet, cela évite d'avoir beaucoup d'erreur lors des pivots ou des virages.
Matériel utilisé:
- des moteurs Faulhaber 2342 (24V) avec un réducteur Faulhaber 30/1 de rapport de réduction 14:1
- des roues de modélisme 1/8ième en mousse de Shore 35. diamètre: 75mm / épaisseur: 37mm
- toutes les pièces sont en aluminium, sauf la pièce qui serre l'axe moteur qui est en inox.
En premier lieu, nous réalisons un bloc de longueur égale à deux fois la longueur d'un moteur, plus 2mm de marge et légèrement plus épais qu'une roue. La hauteur de ce bloc dépend du diamètre des roues, de l'épaisseur de la plaque du dessous, et de la hauteur de garde au sol désirée. Dans notre cas, ce bloc fait 104mm de long par 80mm de large par 25mm de haut.
Nous faisons une rainure centrale de l'épaisseur du diamètre du moteur et de la profondeur d'un rayon du moteur. De ce fait les deux moteurs seront le plus alignés possible. L'idéal serait d'avoir un demi-cylindre du diamètre du moteur mais vu la longueur demandée, l'outil pour réaliser cela est difficile à trouver.
Pour maintenir les moteurs dans leur rainure, nous réalisons un second bloc sur le même principe que le premier. On fixe les deux blocs entre eux de part et d'autre de la rainure. La hauteur de celui-ci est de 41mm pour que la hauteur totale soit au-dessus de la roue pour mettre une plaque pour que rien ne vienne toucher les roues. Cela permet aussi de rajouter du poids au niveau des roues et descendre le centre de gravité. ATTENTION: il ne faut aucunement que ce "sandwich" serre le moteur. En effet, la gaine du moteur est assez délicate et toute déformation de celle-ci endommage le Stator et donc le moteur.

bloc dessous

mise en place des moteurs

bloc dessus



Passons donc à la fixation du motoréducteur.
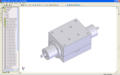
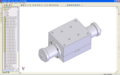
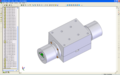
Nous avons vu que la fixation sur les moteurs étaient à proscrire, donc il ne reste que le réducteur pour fixer l'ensemble. Il faut faire une pièce sur laquelle se fixe l'avant du réducteur (trous taraudés existants pour la fixation) et pour que le tout se fixe sur les blocs qui englobent les moteurs. Nous faisons pour cela une pièces cylindrique qui entoure le réducteur, avec un épaulement qui permettra de se fixer sur les blocs.

attache motoréducteur

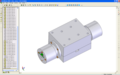
attache motoréducteur en coupe
mise en place de l'attache

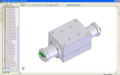
fixation de l'attache avec le réducteur

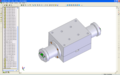
fixation de l'attache avec les blocs moteurs





Passons maintenant à la fixation des roues sur les moteurs.
Il faut éviter de mettre en porte à faux l'axe moteur pour ne pas qu'il casse d'une part, mais aussi pour que le moteur ne force pas pour entrainer la roue. Pour cela il faut que le centre de la roue soit au niveau du réducteur. Ces roues sont constituées d'une jante aluminium faite maison et d'un pneu de modélisme. Ces pneus sont déjà sur jantes plastiques, donc nous évidons les jantes. Nous emmanchons à force la jante dans le pneu.

roue du robot

Pour fixer la roue sur l'axe moteur nous réalisons une pièce cylindrique avec un épaulement. On la perce au centre du diamètre de l'axe moteur, puis nous fraisons l'épaulement jusqu'au méplat de l'axe (un ou deux dixième en dessous même pour que le serrage se face plus facilement). S'il n'y a pas de méplat il faut usiner jusqu'à la tangente de l'axe moteur. Pour serrer l'attache sur l'axe moteur nous utilisons un morceau d'inox de 3mm d'épaisseur que nous serrons avec des vis, ce qui écrase l'axe moteur.

attache jante/moteur
mise en place de l'attache
plaque de serrage
serrage par vis




Maintenant il ne reste plus qu'à monter la roue sur l'attache.
mise en place des roues
fixation des roues


Voici donc à quoi ressemble les blocs moteurs au final:

BLOC MOTEUR
